Москва
В. Волхонский, П. Воробьев
Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики
Очевидно, что эффективность любой системы охранной сигнализации (СОС) в значительной мере зависит от параметров устройств обнаружения нарушителей и, в частности, от вероятности обнаружения несанкционированного проникновения (НП).
В ряде задач разработки СОС как для помещений, так и для открытых территорий важным является анализ характеристик обнаружения охранными датчиками. Основной такой характеристикой можно считать вероятность обнаружения. Очевидно, что эта вероятность зависит от ряда факторов, характеризующих как самого нарушителя (скорость и направление движения, одежда и др.), так и окружающие условия (температура, наличие источников помех и т.д.). Особенно влияние упомянутых факторов будет сказываться при использовании ПИК датчиков вне помещений.
Другой важной проблемой, влияющей на вероятность обнаружения, является квалификация нарушителя. Подготовленный или высококвалифицированный нарушитель, знающий принципы действия датчиков, их слабые места, имеющий априорную информацию об объекте и системе сигнализации, будет использовать эту информации для преодоления СОС без обнаружения. Например, выбирать маршрут проникновения, учитывая меньшую чувствительность ПИК датчиков при радиальном направлении движения. Поэтому такие знания в сочетании с информацией о топологии объекта и местах расположения датчиков, которыми может обладать квалифицированный нарушитель, могут сыграть решающую роль в преодолении СОС без обнаружения.
Таким образом, представляется интересной оценка характера изменения вероятности обнаружения при разных условиях проникновения (направлениях и скорости движения). Такая информация будет весьма полезна как при разработке СОС (выборе количества, мест расположения датчиков), так и при оценке уязвимости объекта (выявлении возможных необнаруживаемых или плохо обнаруживаемых маршрутов проникновения). Особенно это может быть важным на открытых площадках, где у нарушителя обычно больше возможности варьировать направлением движения.
Как известно, наилучшим характеристикам обнаружения соответствует движение поперек диаграммы обнаружения. Такие же условия установлены в государственном стандарте [1] для проверки подобных устройств и в европейском стандарте [2]. В реальных условиях это далеко не всегда соблюдается. В соответствии с разделом «Методы испытаний» [1] извещатель должен обнаруживать движение (выдавать извещение о проникновении) стандартной цели (человека), перемещающейся в пределах зоны обнаружения поперечно ее боковой границе в диапазоне скоростей 0,3-3 м/с (0,1-5,0 м/с для извещателей для открытых площадок) на расстояние до 3 м. При этом расстояние между извещателем и целью (человеком) должно оставаться постоянным.
Однако стандарт не учитывает требования по обнаружению стандартной цели при других направлениях движения и вероятностного характера обнаружения цели. Поэтому представляется целесообразным переход к вероятностной методике оценки надежности обнаружения.
Выполним оценку вероятности обнаружения при различных скоростях и направлениях движения. Ограничимся случаем квазиравномерной скорости и квазилинейного направления движения. Это, конечно, частный случай, но он может быть полезным по крайней мере для предварительной оценки вероятности обнаружения.
Будем основываться на вышеупомянутых условиях проведения эксперимента по оценке вероятности обнаружения. Простейший статистический способ оценки заключается в проведении ряда испытаний и сравнении количества срабатываний датчика с общим количеством испытаний. Однако при этом не будет учитываться расстояние, пройденное целью до точки обнаружения. Поэтому корректнее использовать методику оценки вероятности обнаружения таких устройств в разных условиях реализации НП, предложенной в [3].
В соответствии с этой методикой оценка такой случайной величины, как значение вероятности обнаружения НП, основана на использовании плотности распределения вероятности расстояния обнаружения (т.е. пути, пройденного нарушителем по зоне до точки обнаружения). При таком подходе вероятность обнаружения НП можно характеризовать интегралом от плотности распределения вероятности расстояния обнаружения
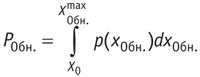
в пределах от начала зоны обнаружения Хmax Обн. до значения расстояния обнаружения (т.е. до точки, в которой произошло срабатывание датчика). Это соответствует значению площади под кривой р(хОбн) в указанных пределах.
Предложенная в [3] методика была проверена экспериментально на пассивном инфракрасном датчике при следующих условиях.
- В качестве цели использовался человек, одетый в джинсовые штаны и рубашку с длинным рукавом, ростом 180 см и массой тела 75 кг.
- Температура фона 26° С.
- Движение осуществлялось в трех направлениях:
- тангенциальном по отношению к оси сегментов диаграммы обнаружения (т.е. под углом 90° к направлению на извеща-тель);
- радиальном, по направлению на изве-щатель (т.е. под углом 0° к направлению на извещатель);
- промежуточном (т.е. под углом 45° к направлению на извещатель).
- Скорость движения цели составляла 0,3; 1,5 и 3 м/с.
Поскольку эксперимент предполагал движение реального человека, то скорость его движения отличалась от заданной. Поэтому проводилась оценка ошибки скорости движения путем расчета среднеквадратического отклонения реальной скорости движения цели от заданной. Она составила для скоростей движения 0,3; 1,5 и 3 м/с значения 0,00074; 0,037 и 0,019 м/с соответственно.
На основании измеренных выборочных значений расстояния обнаружения строились гистограммы плотности распределения вероятности обнаружения в зависимости от расстояния, пройденного до точки обнаружения. На рисунке 1 приведены гистограммы выборок расстояния обнаружения для тангенциального (рис. 1, а), промежуточного (рис. 1, б) и радиального (рис. 1, в) направлений движения цели.
Как видно из рисунка 1, а, при движении цели в направлении, установленном в стандарте для испытаний, обнаружение происходит на расстояниях от 1,1 м до 2,7 м и выборочная оценка вероятности обнаружения равна единице (горизонтальная пунктирная линия на рисунке 3). Т.е. требования [1] выполняются.
Рис. 1. Тангенциальное (а), промежуточное (б) и радиальное движение цели (в)
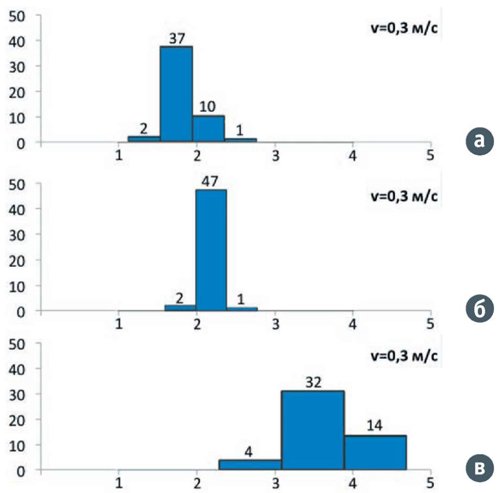
При промежуточном (рис. 1, б) и в еще большей степени при радиальном (рис. 1, в) направлениях движения происходит заметное увеличение среднего значения расстояния обнаружения. Это означает, что до обнаружения цель должна пройти большее расстояние по зоне обнаружения. Так, при радиальном направлении и пройденном расстоянии 3 м вероятность обнаружения составляет всего около 0,02 (рис. 3).
На рисунке 2 показаны гистограммы для радиального направления (худшего случая с точки зрения обнаружения) и различных скоростей движения цели.
Сравнение рисунков 1 и 2 позволяет сделать вывод о заметном увеличении разброса значений расстояния обнаружения, на котором происходит обнаружение цели (в дополнение к увеличению среднего значения), с увеличением скорости. И, следовательно, приводит к увеличению вероятности пропуска цели.
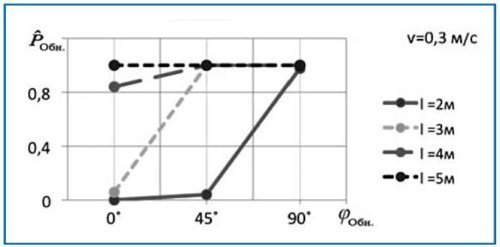
Графики на рисунке 3 иллюстрируют зависимость вероятности обнаружения от расстояния. И позволяют говорить о том, что при радиальном направлении движения для достижения вероятности обнаружения близкой к единице необходимо расстояние более 5 м. Поэтому, если размер реальной зоны обнаружения мал, например, ограничен размерами помещения, то это может привести к существенному риску пропуска цели. Таким образом, можно сделать вывод о значительном снижении вероятности обнаружения при отклонении направления движения от тангенциального. Так, для достижения значения вероятности обнаружения, близкого к единице при произвольном направлении движения, цель должна преодолеть практически вдвое большее расстояние до обнаружения, чем установлено в стандарте. А это может не выполняться при ограниченном размере реальной зоны обнаружения.
Рисунок 4 иллюстрирует характер изменения вероятности обнаружения при разных направлениях движения на скорости 0,3 м/с. И подтверждает выводы, сделанные выше, о существенном падении вероятности обнаружения при произвольном направлении движения цели. Так, для надежного обнаружения на скорости 0,3 м/с требуется, чтобы цель прошла не менее 5 м.
Полученные экспериментальные данные позволяют оценить вероятность обнаружения при различных скоростях и направлениях движения нарушителя. При радиальном направлении движения существенно уменьшается вероятность обнаружения. Аналогичный эффект имеет место при пространственном ограничении размеров зоны обнаружения. Т.о. можно рекомендовать:
- тщательный выбор места установки с учетом возможных маршрутов движения нарушителя;
- искусственное ограничение возможных направлений движения, например, какими-либо преградами, вынуждающими нарушителя двигаться в направлении максимально надежного обнаружения;
- выбор достаточно протяженных зон обнаружения;
- использование перекрывающихся зон обнаружения нескольких ПИК датчиков, расположенных в смежных углах помещения [4].
Рис. 2. Радиальное направление движения цели
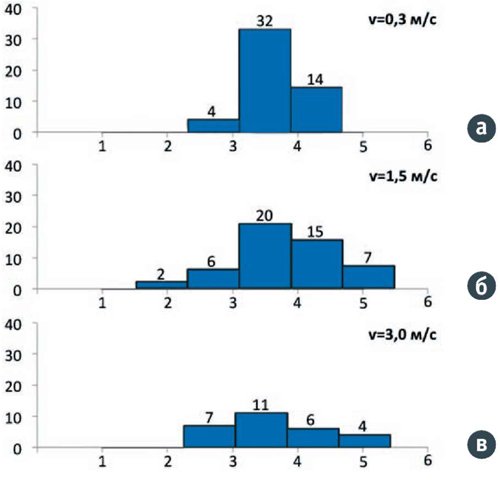
Рис. 3. Влияние расстояния, пройденного целью, на вероятность обнаружения
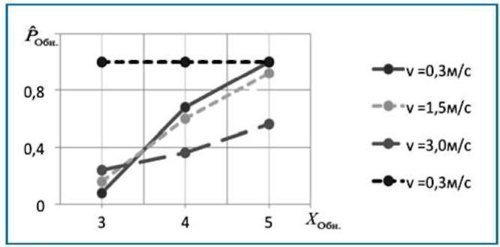
Рис. 4. Влияние направления движения цели на вероятность обнаружения