Москва
Василий Волковицкий, зам. директора представительства ADI Global Distribution
Владимир Волхонский, директор представительства ADI Global Distribution
В предыдущей статье авторов [1] были рассмотрены основные возможности автоматизированного анализа видеоизображений, что может быть полезным с практической точки зрения. Данная статья посвящена объяснению основных принципов функционирования подобных систем и может представлять интерес для читателей, которые не ограничиваются знаниями возможностей оборудования, а интересуются также особенностями реализации и принципами его функционирования.
С общей точки зрения основная задача, решаемая системой видеоанализа, состоит в обеспечении безопасности, следовательно, прежде всего, необходимо выявить действия, которые непосредственно являются угрозой или могут создать угрозу. Хотя, как уже ранее отмечалось, задачи безопасности не являются единственными для систем телевизионного наблюдения в целом и видеоанализа в частности. Например, подсчет числа посетителей может использоваться для контроля того, все ли посетители покинули помещение или не слишком ли много посетителей в одном помещении. То есть вопросов, непосредственно не соотнесенных с безопасностью. Другое применение, не связанное с безопасностью, — сбор статистических данных о посещаемости магазина, к примеру.
В задаче автоматизированного видеоанализа выявление таких действий осуществляется в автоматическом режиме с помощью специальных алгоритмов для анализа и интерпретации полученных видеоданных и выдачи соответствующей информации. Окончательное принятие решений осуществляет, как правило, оператор. Поэтому с точки зрения всей системы нужно говорить именно об автоматизированном видеоанализе. А собственно анализ осуществляется автоматически системой по определенному алгоритму. Исходной информацией, предметом анализа, является видеоизображение контролируемой зоны. Хотя непосредственно анализируется видеосигнал, соответствующий этому изображению. Но для понимания и восприятия удобнее оперировать понятием анализа видеоизображения.
Действия, которые могут выявляться в процессе видеоанализа, можно разделить на следующие основные группы.
1. Санкционированные действия, которые не противоречат правилам функционирования контролируемого объекта.
2. Несанкционированные действия, представляющие непосредственную угрозу. В этом случае система по характеру изменений в видеоизображении однозначно может определить, что эти действия несанкционированные и представляют угрозу. Например, проникновение на охраняемую территорию.
3. Действия, которые могут представлять угрозу. То есть такие, по которым нельзя сделать однозначного вывода о конечной цели объекта, который их совершает. Например, сумка, оставленная пассажиром в зале ожидания. В этой ситуации однозначного решения принять не удается. Поскольку это может быть связано как с забывчивостью пассажира, так и с умышленными действиями преступника. Такие действия требуют дальнейшего анализа оператором совместно с другими подразделениями службы безопасности.
4. Специфические действия для определенных задач, решаемых данной ТВ-системой, не являющиеся задачами системы безопасности. Например, упоминавшаяся выше задача сбора статистических данных о количестве посетителей.
Для выявления упомянутых действий необходимо по имеющемуся видеосигналу (соответствующему видеоизображению охраняемой зоны) обнаружить заданные действия некоего объекта. Как правило, это связано с движением определенного характера. То есть система должна автоматически выявить движущийся объект и проанализировать определенные параметры его движения. Хотя правильнее говорить об обнаружении изменений в видеоизображении строго определенного характера. Например, проявление возгорания будет характеризоваться именно изменениями в определенной части изображения без предварительного движения туда объекта. Но практически в большинстве случаев эти изменения связаны все-таки с движением, его характером (направлением, прекращением, изменением направления, скорости и т. д.). Тем более, что изменения можно трактовать как частный случай движения.
Последовательность решения задачи
Учитывая вышесказанное, основными шагами в решении задачи автоматического видеоанализа являются:
Приведем примеры. Угроза — кража товаров со склада. Ее непосредственное проявление с точки зрения системы ТВ-наблюдения состоит в том, что некий субъект должен подойти к полке и взять что-либо с нее. Характеристики и параметры, которые должна анализировать система видеоанализа, — перемещение субъекта к полке, т. е. в определенную область контролируемой зоны, удаление предмета с полки (который до этого был неподвижен) и движение этого предмета вместе с субъектом от полки (из определенной области контролируемой зоны).
Таким образом, системе видеоанализа необходимо:
Однако такая последовательность действий еще не будет свидетельствовать о краже. Поскольку это могут быть и санкционированные действия. То есть необходимы определенные последующие или предшествующие действия для принятия
окончательного решения. Например, проверка ответственными лицами, правомочные ли это действия. Примером предшествующих действий может служить предварительное оформление изъятия товара со склада с вводом разрешения на изъятие соответствующего товара в систему учета; разблокирование системой контроля доступа дверей на склад; фиксация изъятого товара считывателем штрихового кода с автоматическим вводом в систему учета и подтверждением этой системой правомочности доступа на склад.
Приведенный пример также свидетельствует, что эффективность решения многих задач видеоанализа существенно повышается при взаимодействии с другими подсистемами безопасности, в первую очередь такими, как контроля доступа и охранной и пожарной сигнализации.
Другой пример — обнаружение оставленных предметов. В этом случае угроза — это оставление предмета неким субъектом. Ее проявление — часть движущегося объекта отделяется от него и остается неподвижной, а сам субъект продолжает движение. Признаки — разделение движущегося объекта на части, одна из которых продолжает движение, а вторая остается неподвижной.
Таким образом, в задачах видеоанализа очень важно выделить особенности, свойственные только интересующему, возможно, потенциально опасному действию, которые позволят разработать или выбрать алгоритм автоматического видеоанализа.
Анализируемое видеоизображение условно можно разделить на две основные составляющие:
На практике фон практически неизбежно претерпевает определенные изменения во времени. Особенно это касается наблюдения за объектами вне помещений. Например, вследствие изменения освещенности в течение суток. Но и в помещениях изменения будут иметь место, к примеру, обусловленные изменением и перемещением тени от объекта. Поэтому фон, или задний план, в общем случае является квазистатическим, т. е. мало или медленно меняющимся.
Рассмотрим основные этапы анализа телевизионных изображений (рис. 1).
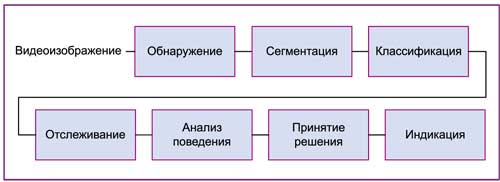
Рис.1. Обобщенный алгоритм анализа видеоизображения
Обнаружение
Первый этап — это обнаружение движущегося объекта. Или другое, часто используемое название этого этапа — выделение переднего плана. По сути, это соответствует обнаружению движущегося объекта на статическом фоне. Для более эффективного решения этой задачи необходимы априорные (предварительные) данные как о самом объекте, так и о фоне. Очевидно, что чем эти данные более полные, тем эффективнее решается задача обнаружения. А от эффективности обнаружения будет зависеть и эффективность решения всей задачи видеоанализа в целом. Обнаружение движения может выполняться с помощью различных алгоритмов. Некоторые из них будут рассмотрены подробнее ниже.
Таким образом, задачей этого этапа является выделение пикселов, принадлежащих переднему плану, т. е. движущемуся объекту. Входными данными является последовательность кадров телевизионного сигнала, а выходными — набор пикселов с изменяющимися от кадра к кадру параметрами.
Сегментация
На этом этапе происходит группирование участков или фрагментов изображения, принадлежащих одному и тому же объекту, в сегменты (или блобы, от англ. blob). В общем случае эти фрагменты могут быть разрозненными и, в то же время, принадлежать одному объекту. При этом для группирования используются различные признаки, такие как принадлежность одной компактной области изображения, движение в одном направлении, с одинаковой скоростью и тому подобные признаки. Используемые признаки зависят от вида самих объектов и характера движения, которое они могут совершать. В дальнейшем параметры самого сегмента изображения и параметры, характеризующие его движения, используются для анализа. Поэтому этот этап также является достаточно важным.
Итак, задачей сегментации является выделение связанных групп пикселов, принадлежащих одному движущемуся объекту, и объединение их в сегменты (рис. 2).

Рис.2. Результат сегментации изображения
Классификация
Форма и параметры полученного сегмента могут использоваться для решения задачи классификации обнаруженного объекта. То есть отнесения обнаруженного объекта к тому или иному классу объектов. Например, какой объект обнаружен — человек или автомашина. Так в простейшем случае соотношение высоты и ширины сегмента может служить признаком принятия решения о том, что это: человек или автомашина. Таким образом, на этом этапе каждый сегмент относится к той или иной группе объектов.
Отслеживание
Выделение определенного сегмента и оценка параметров его движения позволяет выполнить отслеживание траектории движения и оценку ее параметров. Это особенно сложно и важно при наличии нескольких объектов в поле зрения телекамеры, когда траектории движения различных объектов могут пересекаться, а сами изображения перекрываться.
Анализ поведения
На основе данных о классификации объекта и оценок параметров его движения, а также относительного положения сегмента на экране (что соответствует в определенной степени положению объекта в контролируемой зоне) можно выполнить анализ «поведения» объекта. Для этого производится сравнение полученных параметров движения и положения объекта с априорной информацией. Например, о разрешенных направлениях движения в определенной части контролируемой зоны или о запрещенных для движения частях этой зоны.
Принятие решения
Как результат, на основе анализа поведения принимается решение в пользу того, какое из упоминавшихся выше действий имеет место. В первую очередь, санкционированное или представляющее угрозу. И, соответственно, какие действия по индикации (оповещению) персонала необходимо предпринять для принятия окончательного решения о характере действий и о реагировании на эти действия.
Индикация
На основе принятого решения осуществляется индикация на видеоизображении, необходимая для визуализации обнаруженных действий для привлечения внимания персонала и принятия решений операторами системы ТВ-наблюдения. Визуальная индикация может сопровождаться (при необходимости) и звуковой, в случае событий, требующих обязательной реакции оператора.
Некоторые из рассмотренных этапов видеоанализа могут отсутствовать, например, классификация обнаруженных объектов. Это зависит от возможностей используемого алгоритма и требований к системе по выявлению тех или иных действий.
Анализ статических изображений
Как пример рассмотренного алгоритма можно привести задачу анализа статических изображений. Хотя она, конечно, имеет отличия от задачи анализа ТВ-изображений. В этом случае речь идет о таких практических приложениях, как, например, считывание двумерных штриховых кодов или идентификация по радужной оболочке глаза.
При этом формируется видеоизображение, на котором предположительно есть искомый объект (рис. 3). В такой задаче обычно достаточно одного кадра видеоизображения. Затем решается задача обнаружения искомого объекта с учетом априорной информации о нем и его характерных отличиях от фонового изображения.
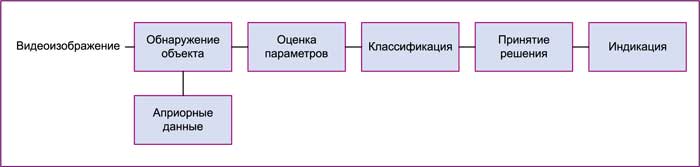
Рис.3. Этапы анализа статического изображения
Такой информацией могут служить, к примеру, мишень в двумерном штриховом коде в виде концентрических квадратов или круглый зрачок глаза [2]. Рассмотренная задача достаточно жестко ограничена поиском изображений только конкретного класса объектов. Обнаружение характерной особенности искомого объекта может свидетельствовать с определенной вероятностью о наличии изображения самого объекта. Поэтому можно переходить к оценке его параметров.
Для рассматриваемого примера со штриховым кодом — это поиск и оценка положения элементов ориентации, с последующим послойным считыванием информации. Для задачи идентификации личности — оценка соответствующих биометрических параметров.
Следующий шаг — классификация объекта. В нашем примере — отнесение товара, которому принадлежит штриховой код, к конкретному классу объектов. Например, к определенной марке мобильных телефонов. Заметим, что при этом не идентифицируется конкретный образец. Вместо классификации может решаться задача идентификации, как в нашем втором примере. В этом случае происходит сравнение полученных параметров изображения с базой данных.
На основе предыдущего этапа принимается решение. К примеру, сколько стоит этот образец телефона. Или что данный субъект имеет право на доступ. И, соответственно принятому решению, производится индикация и реагирование. В частности, высвечивается цена на дисплее, и кассир должен получить оплату. Либо загорается зеленый светодиод и разблокируется устройство управления доступом.
Особенностью рассматриваемой задачи является то, что есть возможность создать условия, максимально удобные для обнаружения искомого изображения с точки зрения его расположения относительно устройства формирования изображения объекта (телекамеры или считывающего устройства) и его освещенности. И, следовательно, есть возможность получения высокого качества видеоизображения и соответствующего ему видеосигнала. Эти условия делают видеосигнал практически детерминированным и с большим количеством априорных данных о нем.
Особенности алгоритмов видеоанализа
Рассмотрим подробнее особенности реализации некоторых этапов алгоритма анализа ТВ-изображения. Начнем с задачи обнаружения.
Обнаружение
Для решения задач обнаружения движущихся объектов на фоновом изображении желательна априорная информация. В зависимости от полноты этой информации могут применяться различные критерии оптимального обнаружения и различения.
Введем необходимые обозначения и сделаем допущения. Будем рассматривать значение сигнала пиксела z=z (x, y, t), который в общем случае является функцией координат x и y и времени t. Этот сигнал, для монохромного изображения, является скалярной величиной, определяемой значением градации серого. А в случае цветного изображения — векторной, зависящей, например, от значений сигналов цветности RGB. Поскольку рассматриваемая задача решается средствами вычислительной техники, то независимо от того, является ли телекамера аналоговым или цифровым устройством, можно считать, что мы имеем дело с последовательностью отсчетов, которые берутся в дискретные моменты времени. Поскольку мы имеем дело со значениями сигналов от пикселов, то и координаты являются дискретными. То есть можно говорить об отсчетах сигнала zinm=z (xn, ym, ti) в дискретные моменты времени ti , где xn и ym определяют положение пиксела в ПЗС или КМОП-матрице, формирующей видеосигнал.
Если говорить об изображении i-го кадра, то он будет представлять собой двухмерную матрицу Z со скалярными элементами zinm для монохромного изображения. Для цветного изображения надо говорить о двухмерной матрице Zi с векторными элементами zinm или о многомерной матрице Zi для каждого момента времени.
Проанализируем основные варианты решения задачи.
Вычитание статического фона
Простейшим случаем является задача обнаружения объектов на фоне статического фонового изображения. Например, в помещении без окон с постоянным искусственным освещением. Тогда моделью фона может служить образец этого фона, при отсутствии каких-либо субъектов или объектов, которые могут перемещаться или существенно изменяться. Будем считать момент t0 выборки образца z0nm=z (xn, ym, t0) фона нулевым моментом времени. В этом случае критерием принятия решения, что сигнал от nm-го пиксела в i–й момент времени не является фоном, может служить неравенство z0nm? z0nm не равно 0.
В реальных ситуациях, даже в упомянутом примере, будет иметь место изменение фона, по крайней мере, за счет теней от перемещающегося объекта. Кроме того, может меняться уровень шумов или могут иметь место изменения параметров изображения за счет колебания напряжения питания. Поэтому надо говорить, по крайней мере, о квазистатическом изображении фона. И сравнение вести с некоторым пороговым значением (рис. 4).
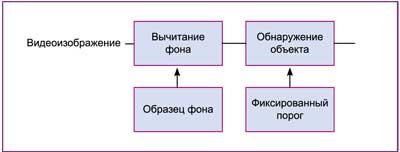
Рис.4. Алгоритм видеоанализа на статическом фоне
Изменение фонового изображения может иметь место по разнообразным причинам.
Во-первых, по содержанию самого изображения. Изменения фона в этом случае могут быть вызваны изменением положения различных элементов объектов фона под воздействием разнообразных факторов, например, колебаниями ветвей деревьев на ветру, волнением на поверхности воды или открывающейся дверью.
Во-вторых, по причинам, связанным с изменением параметров изображения фона за счет изменения освещенности. Изменения освещенности могут быть различной природы.
Изменение освещенности, непосредственно влияющее на параметры видеоизображения, может приводить также и к изменению других параметров. Например, как вторичный фактор может происходить изменение отношения «сигнал/шум» или переход от цветного изображения к черно-белому в телевизионных камерах типа «день-ночь».
Ясно, что влияние этих факторов на характер фонового изображения будет различным для видеоизображений, полученных в помещениях или на открытых пространствах. В первом случае влияние изменений естественной освещенности может быть незначительным. И наоборот, совсем другая картина будет иметь место при работе телекамеры на улице. Вне помещений перепады освещенности будут весьма существенными.
В-третьих, параметры фона могут быть обусловлены изменением прозрачности среды наблюдения:
И, наконец, это влияние шумов различной природы. Таких, как собственные шумы элементов системы ТВ-наблюдения и помехи различной природы.
Адаптивная модель фона
Возможность различных изменений параметров фона приводит к необходимости подстройки параметров модели фона. Поэтому модель фона должна быть адаптивной, подстраиваемой в соответствии с возможными изменениями. Особенно это касается анализа видеоизображений, полученных вне помещений. Скорость и характер возможных изменений фона определяют требуемую скорость подстройки модели фона и ее параметров.
Поэтому в таком случае сравнение надо вести с некоторым порогом z0nm? z0nm больше или равно ZПор , чтобы случайные колебания фонового изображения не приводили к ложным решениям о наличии движущегося объекта. Кроме того, в общем случае, и порог и модель должны быть адаптивными (рис. 5). То есть должна осуществляться подстройка параметров модели фона и самого порога во времени с учетом различных по характеру изменений фона.
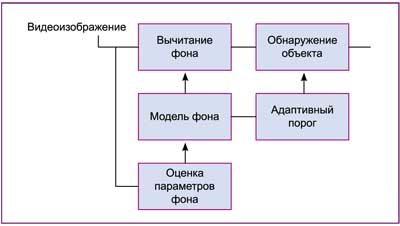
Рис.5. Видеоанализ с адаптивной моделью фона
Очевидно, что увеличение значения порога будет приводить, с одной стороны, к большей помехоустойчивости (к меньшему влиянию шумов и изменений фона), но с другой стороны — к уменьшению вероятности обнаружения движущегося объекта.
Изображение на рис. 6 иллюстрирует влияние порога на результат вычитания фона [3]. При слишком высоком значении порога изображения движущихся объектов получаются сильно фрагментированными (рис. 6, а). Так, изображение левого объекта состоит из нескольких отдельных разрозненных фрагментов. При низком значении порога (рис. 6, б) появляются многочисленные фрагменты, обусловленные шумами и слабыми изменениями фона. Кроме того, хорошо видно, что как часть движущегося объекта выделяется и его тень.

Рис.6. Результат сегментации изображения
Вычитание предшествующего изображения
Другой вариант алгоритма обнаружения движения, по сути, аналогичный предыдущему, состоит в использовании в качестве образца фона предыдущих кадров изображения (рис. 7). В этом случае из текущего изображения вычитается изображение предыдущего кадра. Одинаковые элементы кадров соответствуют фону и при вычитании дают нулевую разность. Отличия в изображении, вызванные движением, приведут к появлению ненулевых разностей. Величина задержки в общем случае может быть различной и соответствовать продолжительности нескольких кадров.
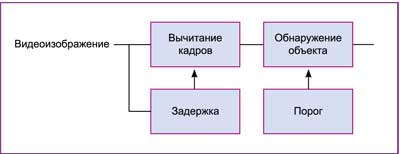
Рис.7. Обнаружение изменений в изображении соседних кадров
В рассматриваемом случае непосредственно выявляются отличия в соседних кадрах видеоизображения.
Недостатки такого способа заключаются в том, что выделенный объект может быть «размытым», поскольку к изменениям будут относиться все отличия сравниваемымых изображений на протяжении временного интервала между кадрами. То есть будет выделен сегмент, соответствующий общей области положения объекта и в текущем, и в предыдущем кадрах.
Статистическая модель
Поскольку упомянутые изменения фона носят в основном случайный характер, то модель фона должна быть в общем случае статистической. То есть в данной задаче применимы методы статистической радиотехники и теории обнаружения. Критерии оптимальности при принятии решений могут быть различными в зависимости от конкретной задачи и обусловливаются полнотой априорных данных.
Последовательности изображений, т. е. кадров, в дискретные моменты времени на интервале наблюдения в общем случае представляют собой последовательность случайных векторных величин inm. Следовательно, их надо характеризовать соответствующими статистическими характеристиками. Для этого могут использоваться различные модели, в частности с гауссовским распределением, поскольку значение яркости каждого пиксела в кадре является случайной величиной, подверженной влиянию большого числа случайных факторов и помех.
Однако одномерное гауссовское распределение применимо далеко не всегда, особенно для цветного изображения. Поэтому достаточно распространенной является модель, использующая аппроксимацию плотности распределения вероятности суммой гауссовских плотностей распределения вероятности [4–5]. Тогда для текущего значения пиксела можно записать выражение,
где  — гауссовская плотность распределения вероятности, J – количество составляющих, wij — весовая функция j-й составляющей,
— гауссовская плотность распределения вероятности, J – количество составляющих, wij — весовая функция j-й составляющей,  и
и  — среднее значение и ковариационная матрица j-й составляющей для i-го момента времени.
— среднее значение и ковариационная матрица j-й составляющей для i-го момента времени.
Весовая функция определяет вклад j-й составляющей в результирующее распределение. Количество составляющих J обычно 3–5. Это справедливо с учетом предположения, что цветовые составляющие независимы.
Структурная схема для этого случая приведена на рис. 8. Параметры статистической модели фона подстраиваются в соответствии с медленными изменениями фона. В зависимости от выбранного критерия оптимальности вычисляется значение порога, с которым сравнивается видеосигнал. И принимается решение, является ли сигнал данного пиксела элементом фона или объекта.
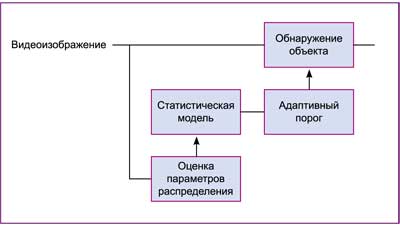
Рис.8. Оптимальное обнаружение движения
Преимуществом такого алгоритма является то, что он позволяет на основе теории обнаружения с учетом априорной неопределенности и информации о фоне и объекте реализовать оптимальные (в соответствии с тем или иным критерием оптимальности) алгоритмы обнаружения.
Сегментация
Обнаружение движущегося объекта (изменяющейся части изображения) позволяет выполнить следующий этап видеоанализа — сегментацию (рис. 9). Исходными данными в общем случае является набор фрагментированных пикселов, которые могут соответствовать как изображению самостоятельного целого объекта, так и являться отдельными разрозненными фрагментами одного и того же изображения. Кроме того, часть полученных фрагментов может быть обусловлена шумами и низким значением порога обнаружения (см. рис. 6, б).
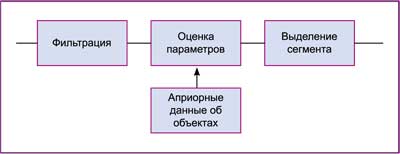
Рис.9. Сегментация видеоизображения
Полученное изображение подвергается фильтрации. В результате чего удаляются фрагменты, обусловленные шумами, и осуществляется сглаживание. Шумы могут быть вызваны как внутренними факторами (например, шум матрицы ТВ-камеры), так и внешними — движением листьев деревьев, дождем, снегом, бликами света и т. п. Для сглаживания применяются специальные фильтры, которые позволяют устранить пробелы в изображениях полученных сегментов и удалить мелкие фрагменты, не представляющие интереса.
Оценка параметров отдельных фрагментов изображения (например, скорости и направления их движения) позволяет объединить их в сегменты, принадлежащие изображению отдельных объектов.
Классификация
На следующем этапе осуществляется классификация сегмента, т. е. отнесение каждого из них к какому-либо определенному классу — к группе. Например, выделенный сегмент может принадлежать к таким классам изображений, как люди, автомашины, животные и т. п. Классификация может осуществляться с использованием одного или нескольких последовательных кадров видеоизображения.
Очевидно, что для успешной классификации необходимо, чтобы возможный разброс параметров, признаков, определяющих принадлежность к одному классу сегментов, был значительно меньше, чем между признаками, принадлежащими разным классам. При этом может использоваться либо бинарная (двухальтернативная) классификация, когда необходимо принять решение о принадлежности объекта к одному из двух классов (образ может принадлежать человеку либо транспортному средству), либо многоальтернативная классификация с несколькими классами (человек, автомобиль, велосипедист, животное и т. п.).
Для ряда задач может быть недостаточно только отнести объект к определенному классу. Например, может потребоваться идентификация. То есть необходимо идентифицировать каждый конкретный объект, принадлежащий определенному классу. А для этого необходимо осуществить распознавание лиц или автомобильных номеров. Распознавание требует более глубокого анализа изображения и знания детальных характеристик всех конкретных объектов, которые участвуют в процессе идентификации.
Рассматриваемая задача достаточно сложная, даже если объекты не перекрываются. В противном случае она существенно усложнится. И тогда должна решаться задача разрешения сигналов. Кроме того, могут иметь место и задачи обнаружения неподвижных объектов. Например, автотранспорта на стоянке.
При классификации должно учитываться положение камеры в пространстве относительно наблюдаемых объектов. Очевидно, что небольшой объект, расположенный рядом с камерой, может занимать в кадре такую же площадь, что и крупный объект, находящийся на значительном расстоянии. Поэтому нужно иметь в виду, что от относительного положения телекамеры и объекта зависит видимый относительный размер объекта, а именно:
С оценкой реального размера объекта связано и то, что получаемое от телекамеры изображение является плоским, и для учета этого в системе важно оценить наличие перспективы в кадре. Это может сравнительно легко решаться в случае с телекамерой, установленной высоко над поверхностью. Например, при наблюдении за движением на перекрестке. В этом случае расстояние до объекта может быть оценено по его угловому положению. Тогда относительный размер объекта, т. е. размер объекта на экране, нормированный к размеру экрана, может корректироваться для использования при классификации.
Кроме того, система видеоанализа может быть обучаемой, для этого при настройке системы задаются несколько образцов объектов, которые необходимо классифицировать, находящихся на различном расстоянии от камеры и в различных частях кадра.
Отслеживание перемещения объектов
Поскольку объекты перемещаются в пределах поля зрения камеры, необходимо отслеживать движение образов. Задача слежения сводится к связыванию положения объекта в начальном кадре в момент его обнаружения с его положением в последующих кадрах. На основании этой информации формируется траектория движения объекта. Современные системы видеоанализа позволяют одновременно отслеживать в кадре большое количество объектов, например Active Alert [1] — до 20 движущихся объектов.
При отслеживании возникает проблема, состоящая в том, что одни объекты в кадре могут перекрывать собой другие. Существуют следующие ситуации, связанные с перекрыванием:
1. Объекты фона закрывают объекты переднего плана. Примером такого события является движение автомобиля за кроной большого дерева. Поэтому необходимо не только отслеживать перемещение автомобиля до попадания его в непросматриваемую зону, но и идентифицировать выезжающий из-за дерева объект как тот же самый автомобиль, а не новый объект.
2. Объекты переднего плана закрывают друг друга. Примером данной ситуации является движение двух пешеходов навстречу друг другу при наблюдении сбоку. В какой-то момент времени их изображения объединятся в один.
Важной задачей при отслеживании движения является выделение индивидуальных, мало меняющихся во времени характеристик и их параметров, присущих конкретно каждому из контролируемых объектов. Поскольку из-за перекрывания объектов слежение за ними может прерываться на некоторое время и необходимо возобновлять слежение вновь после появления объекта. Одними из наиболее простых примеров таких параметров могут служить скорость и направление движения автомашин. Так как возможная скорость изменения этих параметров ограничена, сложность возникает при остановках объекта. В таких случаях необходимо запоминание соответствующего сегмента, чтобы при восстановлении движения соотнести его с тем же самым объектом. А не фиксировать как новый.
Анализ поведения
Возможности системы по реализации автоматического анализа поведения объекта в значительной мере зависят от четкой постановки задачи. То есть от формулировки характерных особенностей, отличий тех или иных действий в поведении объекта, представляющего собой непосредственную опасность или потенциальную угрозу. И позволяющих выделить его среди других, не создающих угрозу. Только если эти особенности:
Таким образом, необходима четкая формулировка характерных особенностей проявления угроз в соответствующих действиях. И эти особенности должны, по возможности, в максимальной степени удовлетворять перечисленным требованиям.
Принятие решения
Принятие решения о характере поведения объекта основывается на результатах анализа видеоизображения, в частности, на выявлении характерных особенностей поведения, удовлетворяющих требованиям упомянутых выше. Однако обнаружение этих особенностей поведения еще недостаточно для принятия решения. Рассмотрим в общем виде алгоритм принятия решения. Как исходные данные должны быть сформулированы?
Например, продавец взял товар со склада. Такое действие может быть как кражей, так и не быть таковой. Первый, второй и третий из перечисленных выше пунктов могут свидетельствовать о краже, а могут и нет. Если это произошло в нерабочее время или в нерабочий день (п. 4), то это с высокой степенью вероятности говорит о краже. Для того чтобы получить полную информацию для окончательного принятия решения, надо проанализировать служебные требования и ограничения на выполнение таких действий. То есть правила функционирования магазина.
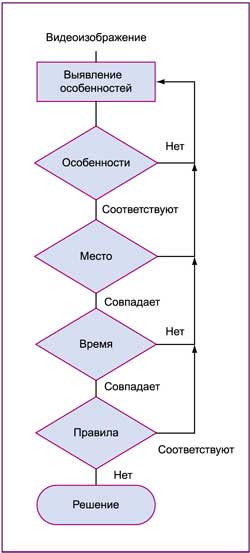
Таким образом, алгоритм принятия решения будет выглядеть следующим образом (рис. 10).
В соответствии с этим алгоритмом, по выявленным в результате анализа характерным особенностям система видеоанализа проверяет:
На основании этого анализа принимается решение о том, что действия объекта являются угрозой или могут создать угрозу, либо запрашивается необходимость участия оператора.
Алгоритм принятия решения по результатам анализа видеоизображения существенно зависит от конкретной реализации системы ТВ-наблюдения. Поскольку в разных по решаемым задачам системах одни и те же действия объекта наблюдения могут квалифицироваться по-разному.
Индикация
Индикация обнаруженных и отслеживаемых объектов может осуществляться различными способами. Можно говорить о трех основных видах индикации в системах автоматизированного видеоанализа:
В первых двух случаях система автоматизированного видеоанализа не может принять окончательного решения о характере действий и требует вмешательства оператора. То есть это автоматизированный режим функционирования системы. В последнем — решение принимается системой и от оператора требуется лишь выполнить действия по пресечению угрозы.
Наиболее простой и эффективный способ индикации заключается в визуализации обнаруженного движения. Визуализация может осуществляться различными способами, зависящими от решаемой задачи. Например, выделением контура движущегося сегмента изображения или области изображения, в которой он находится, в том числе и с цветовыми различиями для разных сегментов. Как дополнительное средство привлечения внимания может применяться мигающая индикация. Также может использоваться визуализация траектории движения объекта (рис. 11). Хотя такая индикация будет эффективна только в областях изображения с низкой интенсивностью движения.

Рис.11. Обнаружение проникновения через забор с отслеживанием траектории движения
При необходимости обязательного принятия решения оператором визуальная индикация должна сопровождаться и акустической (например, о проникновении в запрещенную зону или о пожаре). В том числе продолжающейся до ее сброса оператором. Акустическая и визуальная индикации могут сопровождаться и автоматическими действиями системы по активизации каких-либо средств противодействия и передачи информации другим службам. Передаваться может как сообщение о событии, так и непосредственно видеоизображение происходящего по различным каналам связи.
В заключение отметим также, что телевизионные системы наблюдения с функциями автоматического видеоанализа позволяют решать часть задач систем охранной и пожарной сигнализации и контроля доступа. Не говоря уже о простой проверке правильности срабатывания систем охранно-пожарной сигнализации. Например, контроль доступа на объект может осуществляться с помощью ТВ-системы наблюдения, считывающей и распознающей лица людей или номерные знаки автомобилей. Очевидно, что возможность использования телевизионных систем для решения сразу нескольких задач является очень привлекательной и эффективной. Особенно с учетом экономических ограничений, которые в той или иной мере присутствуют всегда. Кроме того, в совокупности с другими подсистемами (ОПС, СКУД) это позволяет существенно повысить вероятность обнаружения угроз.
Также надо отметить, что круг решаемых системами автоматизированного видеоанализа задач может быть расширен при использовании не только телекамер, но и других устройств формирования изображений, например, тепловизоров, устройств интроскопии и досмотрового оборудования. Например, для выявления людей с повышенной температурой при санитарном контроле или запрещенных к провозу предметов определенной формы, спрятанных под одеждой.
Источник: "БДИ № 2, 2009 год."