Москва
Сапожников Константин Николаевич, ведущий эксперт Bosch Building Technologies
Видеонаблюдение давно стало неотъемлемой частью первого рубежа защиты практически любого среднего и крупного объекта. Несмотря на то, что специалисты традиционно выделяют ряд недостатков, присущих системам такого класса, например, высокий уровень ложных тревог при работе в автоматическом режиме, зависимость от погодных условий и освещения, сложность расширения (масштабирования) системы, проблемы с организацией новых каналов связи, без использования систем видеонаблюдения и радиолокационных комплексов зачастую обойтись просто нельзя. В ряде случаев для выработки правильной реакции на инцидент недостаточно просто знать, что в какой-то точке в данный момент времени произошло проникновение, также необходимо оперативно получать информацию о поведении цели до и после нарушения рубежа защиты. Ведь одно дело, если выбежавшее из леса животное выкопало ямку под забором и убежало обратно, и совершенно другое, если перелезший через забор человек оставил закладку на территории охраняемого объекта и скрылся.
Залог успешной работы системы периметрального видеонаблюдения – правильное планирование размещения оборудования и проектирование стабильной системной архитектуры.
Не зря при проектировании комплексной системы безопасности крупного объекта именно разделу, связанному с периметром, уделяется больше всего внимания с точки зрения расчетов и моделирования.
Для оценки возможностей видеоаналитики и правильного расположения камер на объекте чаще всего применяется модель DORI.
DORI (Detect, Observe, Recognize, Identify) – это стандартизированная модель для определения возможности обнаруживать и идентифицировать людей или объекты в пределах заданной области на базе видеоизображения от камеры. На сегодняшний день можно говорить о том, что хорошая камера с разрешением 2 Мп и фокусным расстоянием 12 мм может дать изображение, пригодное для обнаружения объекта на расстоянии 240–250 м, идентификация в этом случае возможна на расстоянии около 13 м.
При выборе типа и количества камер для наблюдения за периметром некоторые заказчики решают ограничиться размещением только поворотных камер. Мотивы такого решения обычно следующие:
Не вызывает сомнения, что относительно небольшое количество поворотных камер, по сравнению со сложным комплексом, проще спроектировать, установить, подключить и обслуживать. Вопрос в том, действительно ли это обеспечивает необходимый уровень защищенности объекта?
Например, в зимнее время системы периметральной охранной сигнализации могут чаще ложно срабатывать на животных или снег на заграждении, заставляя камеры отвлекаться на эти события.
К тому же, если проникновение не спонтанное, то злоумышленники могут долго готовиться к прорыву и использовать тактику умышленного саботажа. Когда, например, две соседние поворотные камеры отвлекаются на незначительные события, и между ними, в образовавшемся слепом пятне, проходит нарушитель.
Развитию индустрии систем безопасности способствует постоянный поток инноваций. Это в полной мере относится и к системам периметрального видеонаблюдения. Однако это явление может оказывать также и негативное косвенное воздействие, поскольку в результате повышается совокупная сложность проекта, усложняется установка и настройка системы, а также требуется больше усилий при ее эксплуатации. Заказчики в поисках золотой середины между стабильностью, простотой и технологичностью начинают отдавать предпочтение тем производителям, кто придерживается философии, в основе которой лежат прежде всего интересы пользователя.
При выборе платформы управления видеоизображениями (VMS) стоит убедиться, что она поддерживает такие современные технологии, как аппаратное декодирование видеопотоков на базе GPU (интегрированных и дискретных) и автоматизированное динамическое управление параметрами кодирования видеопотоков от камер – в ряде случаев это позволяет довольно значительно уменьшить объем передачи данных без ущерба для качества изображения, так как, за счет совместной работы со встроенной в камеру аналитикой, технологии интеллектуального управления данными обеспечивают адаптивную регулировку параметров кодера на основе уровня движения во всей сцене или ее частях для обеспечения оптимальной скорости передачи данных, и в сочетании с передовыми функциями динамического шумоподавления и кодированием видео по стандарту H.265 скорость передачи данных можно снизить вплоть до 80%. В результате можно существенно уменьшить затраты на систему хранения и требования к параметрам локальной сети передачи данных. Кроме этого, лучше заранее обратить внимание на нюансы, связанные с настройкой обработки событий: например, возможность отображать отдельные настройки тревоги, позволяющая определять приоритет и автоматически отображать их на экране по очереди, позволяет оператору получать полный обзор ситуации и быстрее реагировать на инциденты, не выполняя поиск в списке с несколькими тревогами. Также немаловажную роль при работе с программным обеспечением периметрального видеонаблюдения играет удобство управления PTZ-камерами. Прежде всего, эргономичный интерфейс и удобные органы управления упрощают слежение за движущимися объектами.
Кроме этого, VMS должна иметь гибкие и удобные средства для глубокой интеграции с другими системами защиты периметра и, прежде всего, радиолокационными системами.
Именно совместное использование поворотных камер, особенно совмещенных с тепловизором, и радаров позволяет получить надежный комплекс, осуществляющий непрерывное и автоматическое наблюдение периметра с большими открытыми пространствами и при этом очень мало подверженный воздействию погодных явлений. Такое решение позволяет захватывать и разделять между собой объекты размером до 25 см на расстоянии до 3 км. Даже 1 радар в паре с камерой может отслеживать несколько объектов одновременно и визуализировать обнаруженные цели на карте, показывая не только их текущие местоположение, но и размер, скорость, а также направление.
Проиллюстрирую эффективность такой связки следующим практическим примером (рис. 1). Представьте ситуацию, когда часть периметра является рекой или озером с областями густого тумана. Видеоаналитика системы наблюдения обнаружила вдалеке небольшую лодку, приближающуюся к границам объекта. После обнаружения цели поворотная камера сопровождает движущийся объект. Но неожиданно лодка скрывается за туманом и останавливается там на некоторое время, после чего продолжает движение. В этом случае видеоаналитика может потерять цель, что приведет к нарушению целостности отслеживания маршрута злоумышленника. Однако дублирующее сопровождение цели радаром не даст этому произойти. Даже невидимая в данный момент для камеры цель все равно видна для радара. Поэтому камера будет терпеливо ждать, пока цель снова не появится в поле видимости, после чего продолжит ее сопровождение.
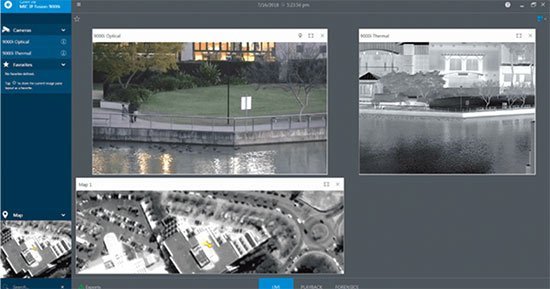
Рис. 1. Отображение целей на карте объекта
Если продолжить разговор о возможности отслеживать положение целей на карте, которая существенно облегчает жизнь операторам, потому что обеспечивает лучшую осведомленность о текущем местоположении угрозы и уменьшает необходимость смотреть на одну камеру, то стоит отметить, что все больше современных камер для периметрального наблюдения имеют встроенную возможность передавать координаты целей, таким образом делая процесс настройки функции геолокации быстрым и простым.
В общем понимании геолокация – это идентификация географического местоположения объекта в реальном мире. Для камер геолокация – это понимание собственного положения камеры, а также объектов, обнаруженных и отслеженных с помощью ее встроенной видеоаналитики, либо в системе глобального позиционирования (GPS), либо на локальной карте.
Конфигурация камеры с такой функцией как правило состоит из 3 основных этапов:
Когда мы говорим о видеонаблюдении для периметра, на ум сразу приходит термин «видеоаналитика». Сегодня в том или ином виде охранная аналитика есть практически в любой камере (например, обнаружение движения в кадре или обнаружение пересечения движущимся объектом виртуальной линии). Другой вопрос, как это работает на практике? В отличие от почти идеальных условий теплого и уютного офиса, на периметре камера будет вынуждена сражаться с такими явлениями, как снег, дождь, блики, колышущиеся ветки деревьев, тени, постоянное изменение освещенности, любопытные пернатые туристы и так далее.
Сегодня для улучшения результатов работы встроенной в камеры видеоаналитики применяются, в том числе, следующие подходы:
Далее давайте постараемся чуть более подробно понять, как работает один из перечисленных выше подходов, а именно, машинное обучение в самой камере.
Машинное обучение служит для обнаружения определенных объектов и по сути является процессом определения программой различий между положительными (целевыми) и отрицательными (фоновыми) образцами. Для этого алгоритм машинного обучения строит модель целевого объекта на основе множества возможных признаков и пороговых значений, в которых эти функции описывают целевой объект (рис. 2). Такое построение модели также называется этапом или процессом обучения. Как только модель становится доступной, она используется для поиска целевого объекта на новых изображениях, получаемых от камеры. Этот поиск по изображению вместе с моделью называется детектором.
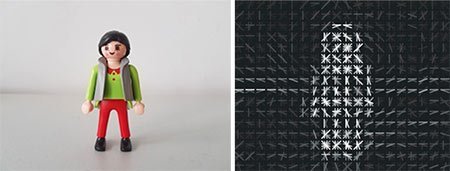
Рис. 2. Гистограмма направленных градиентов (HoG)
Основываясь на примерах целевых и нецелевых объектов, камера использует алгоритмы машинного обучения, чтобы позволить пользователю определять интересующие его объекты и генерировать для них детекторы. В отличие от движущихся объектов, которые может обнаруживать обычная видеоаналитика, камера с расширенной машинным обучением аналитикой на борту позволяет обнаруживать как движущиеся, так и неподвижные объекты, разделять и классифицировать их. Причем обучение может проводиться как на живом видео, так и на записях, а созданные на одной камере детекторы могут быть распространены на другие камеры.
На данный момент существуют различные методы машинного обучения с использованием таких алгоритмов, как SVN, AdaBoost и Decision Trees. Каждый из этих методов имеет определенные преимущества, однако все они приводят к одинаковым требованиям к уровню производительности. Детектор, основанный на этих функциях, обычно может работать в режиме реального времени на текущем оборудовании современной сетевой камеры.
Нейронные сети основаны на принципах, присущих зрительной коре головного мозга человека, и способны самостоятельно изучать описательные алгоритмы. Они используют нейросетевую структуру параметров оптимизации вместо использования алгоритмов, созданных вручную. Как правило, нейронные сети для обработки изображений также изучают граничные элементы и объединяют их сначала с частями объекта, а затем с самим целевым объектом. Глубокие нейронные сети для обработки изображений используют около 20 миллионов параметров и могут повысить производительность до 30%. С другой стороны, глубокие нейронные сети – это метод грубой силы, который требует вычислительной мощности в сотни раз большей, чем доступно в современных сетевых камерах. При этом возможно использование небольших сетей с вычислительной мощностью, аналогичной алгоритмам, написанным вручную, но прирост производительности в этом случае, как правило, будет намного меньше.
Помимо модели и метода обучения, также очень важны и сами образцы целевых объектов и фона. Для такой задачи, как обнаружение лица или человека, положительные образцы должны показывать все возможные вариации, включая перспективу и позу, тогда как фоновые образцы должны представлять по сути «весь мир». Поэтому для машинного обучения нужны десятки тысяч примеров целевого объекта и миллиарды примеров того, как выглядит остальной мир. Это огромные усилия как для сбора, так и для подготовки образцов изображений. Для автоматического машинного обучения либо целевые объекты должны быть отмечены на изображении, либо изображения должны быть ограничены таким образом, чтобы показать только целевой объект. Кроме этого, моделирование сложности всего мира является одной из причин, по которой машинное обучение является вычислительно дорогим.
Одна камера смотрит не на весь мир сразу, а только на одну конкретную область. Чтобы описать как целевой объект, так и фон для одной сцены, требуется гораздо меньше образцов, даже если учитывать различные сезоны и погодные условия. В зависимости от задачи количество требуемых образцов может составлять от нескольких десятков до нескольких сотен штук. Это открывает возможность для каждого обучить свой собственный детектор на практически любой целевой объект.
Многие эксперты сейчас задаются вопросом, заменит ли машинное обучение, особенно глубокое обучение, классическую видеоаналитику? На мой взгляд, в ближайшем будущем нет.
Но использование машинного обучения позволит эффективно дополнить классическую видеоаналитику, ведь, с одной стороны, обычная охранная видеоаналитика должна справляться с большими расстояниями обнаружения, соответственно, несколькими пикселями на целевом объекте; широким спектром поз (ходьба, бег, ползание и т.д.) и неожиданным поведением цели. При этом классическая встроенная видеоаналитика может работать на сравнительно невысоких вычислительных мощностях, но нацелена она на движущиеся объекты, и все стационарные просто игнорирует. С другой стороны, машинное обучение требует высокого разрешения и, таким образом, эффективно работает только на близком расстоянии. Это также требует высокой вычислительной мощности, что является одной из основных причин, по которой внедрение не является широко распространенным. Кроме того, такой тип аналитики может обнаруживать только выученные и ожидаемые объекты. Но при этом, с машинным обучением, объекты могут быть должным образом классифицированы и хорошо разделены между собой. Кроме этого, неподвижные объекты все еще могут быть обнаружены даже после очень долгого времени без движения.
Информация и фото с https://algoritm.org/arch/arch.php?id=98&a=2376